


Entry posted by Vorticon
1,002 views
The Heathkit Hero Jr robot came out in 1984 as a more home friendly version of the original Hero 1 robot, but was still equipped with multiple sensors, speech and programming capabilities albeit without a robotic arm attachment. I bought my robot on Ebay and upgraded it with extra memory (24K), an updated ROM, serial communication and a multi-cartridge which combined all of the cartridges produced for the Hero Jr into one master cart, as well as a beefy 10Ah battery and full documentation. The Robot Workshop (https://www.robotworkshop.com/robotweb/) still has most parts, upgrades and documentation for the Hero Jr at very reasonable prices.

| Manufacturer | Heathkit |
|---|---|
| Type | robot |
| Release date | 1984 |
| Introductory price |
Kit US$599.95, Assembled US$1000[3] |
| Discontinued |
Before October 1987 (Assembled)[15] 1995 (Kit) |
| Units sold | 4000 (across 8 years) |
| CPU | Motorola 6808 1 MHz |
| Memory |
RAM: 2 kB, expandable to 24 kB Monitor ROM: 32 kB |
| Display | 9 LEDs |
| Sound | Votrax SC-01 speech synthesizer[5] |
| Input | Hex keypad with 17 keys |
| Power | Batteries:6 V 3.8 A·h x2, x4 optional |
| Dimensions | 19 inches high[16] |
| Mass | 21.5 pounds[16] |
The interesting thing is that all the electronics are located in the "head" of the robot and under the front panel, while the drive mechanism and battery are in the bottom part, leaving most of the mid-section open, which was very inviting for modifications and modern upgrades. And while I dabbled with this idea for a while, I ended up deciding not to modify the robot from its original condition and opting to experiment with using the serial port as the only means of communication with it. The Hero Jr is capable of baud rates from 300 to 9600 with Even parity and 7 data bits.
An early experiment I did involved a wired serial connection to a Raspberry Pi Model B where I had a Pi camera recognize a ball using the OpenCV framework running on the Rpi, and the result was communicated to the Hero Jr who in turn verbalized it using its on-board speech synthesizer:
This served as a proof of concept, but I really wanted to ditch the serial tether and go completely wireless. I also wanted to use the TI 99/4A computer, and I already had quite a bit of experience with wireless serial communication on it from my previous wireless weather station project:
The main problem I ran into was the the Xbee transceiver I used for that project did not support 7 data bits, only 8, and it turned out that almost all available modern transceivers had the same issue!. Luckily, I finally was able to find a very cheap Chinese transceiver called the HC-12 which costs less than $5 per module and supports a wide range of communication parameters.
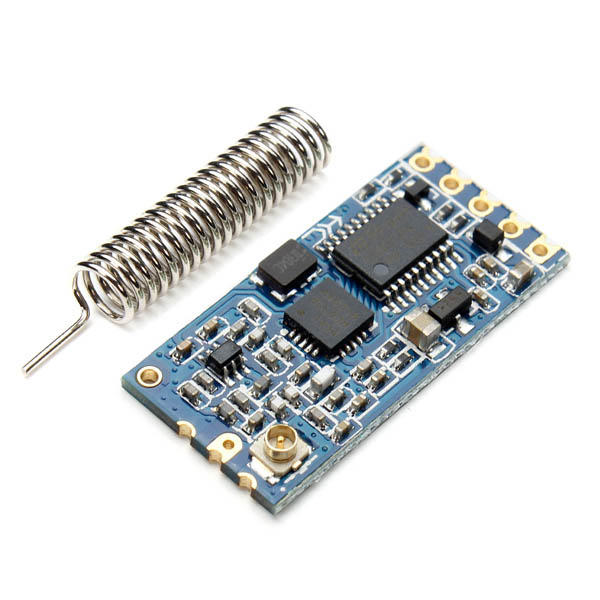
It's really designed for use with an Arduino, but with the addition of a GPIO to serial converter, one can connect it to a standard computer terminal.

From there, I went through a couple of experimental tests as shown below. The main difficulty encountered was the very short range of the coil antenna that comes stock with the HC-12 module, and so this required upgrading it to beefier coax antenna.
From there I was finally ready to put the project together using the TI 99/4A computer. I opted to use RXB on the TI side because it allowed low-level access to the serial card using the CALL IO command, something not available on other Basics. This was necessary because the HC-12 was not very reliable in its wireless transmissions and communication was frequently dropped, thus requiring a form of communication time-out feature in order to resend dropped data packets.
Here's the code for the TI. You might note that there are a lot of repetitive routines which could not be consolidated into subroutines because the ON ERROR command in Extended Basic does not work within subroutines.
// HERO Jr remote exploration program // November 2019 // INITIALIZATION CALL CLEAR OPTION BASE 1 DIM MAP(23,32) HOMEX=16 HOMEY=12 PRANGE=0 TCOUNT=0 DIR=1 !1=N 2=E 3=S 4=W OPEN #1:"RS232.BA=9600.DA=7.PA=E.EC",UPDATE CRU=2464 !CRU ADDRESS OF TMS9902 (>1340) DIVIDED BY 2 // CHECK IF ROBOT IS READY PRINT "CHECKING ROBOT STATUS" CheckStatus: CALL IO(3,1,CRU+18,0) PRINT #1:65 GOSUB BytePresent IF FLAG=0 THEN CheckStatus Status: ON ERROR Status INPUT #1:ANS$ ON ERROR STOP IF VAL(ANS$)<> 1 THEN CheckStatus ELSE PRINT "ROBOT IS READY!": : PRINT "PRESS ANY KEY TO START" GetKey: CALL KEY(0,K,S) IF S=0 THEN GetKey // SET UP DISPLAY CALL CLEAR // CHARACTER DEFINITIONS CALL CHAR(104,"FFFFFFFFFFFFFFFF") !BLACK LEVEL 0-20 CALL CHAR(112,"FFFFFFFFFFFFFFFF") !GRAY LEVEL 21-100 CALL CHAR(120,"FFFFFFFFFFFFFFFF") !WHITE LEVEL 101-255 CALL CHAR(105,"FFC3A59999A5C3FF") !OBSTACLE CALL CHAR(106,"183C5A9918181818") !UP ARROW CALL CHAR(107,"080402FFFF020408") !RIGHT ARROW CALL CHAR(108,"18181818995A3C18") !DOWN ARROW CALL CHAR(109,"102040FFFF402010") !LEFT ARROW DIRSPR=106 CALL COLOR(10,2,16,11,15,16,12,16,16) CALL SPRITE(#1,DIRSPR,9,(HOMEY-1)*8+1,(HOMEX-1)*8+1) // START EXPLORATION RX=HOMEX RY=HOMEY Explore: TCOUNT=TCOUNT+1 IF TCOUNT>10 THEN Home // GET LIGHT LEVEL LightInput: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:6 !Read light sensor GOSUB BytePresent !WAIT FOR BYTE TO COME IN IF FLAG=0 THEN LightInput Status1: ON ERROR Status1 INPUT #1:LIGHT$ ON ERROR STOP IF VAL(LIGHT$)<21 THEN CALL HCHAR(RY,RX,104) ELSE IF VAL(LIGHT$)<101 THEN CALL HCHAR(RY,RX,112) ELSE CALL HCHAR(RY,RX,120) CALL DELAY(1) // Check for movement in front of robot MotionCheck: CALL IO(3,1,CRU+18,0) ! CLEAR RECEIVE BUFFER PRINT #1:8 !Read infrared sensor GOSUB BytePresent IF FLAG=0 THEN MotionCheck Status7: ON ERROR Status7 INPUT #1:HEAT$ ON ERROR STOP IF VAL(HEAT$)=0 THEN RangeInput DISPLAY AT(24,1)BEEP:"MOTION DETECTED!" Speak1: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:9 !Speak CALL DELAY(1) PRINT #1:1 !PLEASE MOVE CLEAR OF ME GOSUB BytePresent IF FLAG=0 THEN Speak1 Status8: ON ERROR Status8 INPUT #1:ANS$ ON ERROR STOP IF VAL(ANS$)<>89 THEN Speak1 DISPLAY AT(24,1):" " GOTO MotionCheck // Check for obstacles RangeInput: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:7 !Read sonar GOSUB BytePresent IF FLAG=0 THEN RangeInput Status2: ON ERROR Status2 INPUT #1:RANGE$ ON ERROR STOP IF VAL(RANGE$)>40 AND ((DIR=1 AND RY>2) OR (DIR=2 AND RX<31) OR (DIR=3 AND RY<22) OR (DIR=4 AND RX>2)) THEN GOTO PathClear IF DIR=1 THEN CALL HCHAR(RY-1,RX,105):: MAP(RY-1,RX)=1 IF DIR=2 THEN CALL HCHAR(RY,RX+1,105):: MAP(RY,RX+1)=1 IF DIR=3 THEN CALL HCHAR(RY+1,RX,105):: MAP(RY+1,RX)=1 IF DIR=4 THEN CALL HCHAR(RY,RX-1,105):: MAP(RY,RX-1)=1 Speak2: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:9 !Speak CALL DELAY(1) PRINT #1:2 !OBSTACLE DETECTED GOSUB BytePresent IF FLAG=0 THEN Speak2 StatusObs: ON ERROR StatusObs INPUT #1:ANS$ ON ERROR STOP IF VAL(ANS$)<>89 THEN Speak2 //Back up Reverse: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:2 GOSUB BytePresent IF FLAG=0 THEN Reverse Status3: ON ERROR Status3 INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN Reverse IF DIR=1 THEN RY=RY+1 IF DIR=2 THEN RX=RX-1 IF DIR=3 THEN RY=RY-1 IF DIR=4 THEN RX=RX+1 CALL LOCATE(#1,(RY-1)*8+1,(RX-1)*8+1) CALL DELAY(2) //Check for surrounding blocked path IF DIR=1 THEN CALL GCHAR(RY,RX+1,BLOCK):: GOTO Turn IF DIR=2 THEN CALL GCHAR(RY+1,RX,BLOCK):: GOTO Turn IF DIR=3 THEN CALL GCHAR(RY,RX-1,BLOCK):: GOTO Turn CALL GCHAR(RY-1,RX,BLOCK) Turn: IF BLOCK<>105 THEN Go_Right ELSE Go_Left //Turn right Go_Right: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:4 GOSUB BytePresent IF FLAG=0 THEN Go_Right Status4: ON ERROR Status4 INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN Go_Right DIR=DIR+1 DIRSPR=DIRSPR+1 IF DIR>4 THEN DIR=1::DIRSPR=106 CALL PATTERN(#1,DIRSPR) CALL DELAY(2) IF HFLAG=1 THEN Home GOTO Explore //Turn left Go_Left: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:5 GOSUB BytePresent IF FLAG=0 THEN Go_Left Status6: ON ERROR Status6 INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN Go_Left DIR=DIR-1 DIRSPR=DIRSPR-1 IF DIR<1 THEN DIR=4::DIRSPR=109 CALL PATTERN(#1,DIRSPR) CALL DELAY(2) IF HFLAG=1 THEN Home GOTO Explore //Move forward PathClear: CALL DELAY(1) Forward: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:3 GOSUB BytePresent IF FLAG=0 THEN Forward Status5: ON ERROR Status5 INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN Forward IF DIR=1 THEN RY=RY-1 IF DIR=2 THEN RX=RX+1 IF DIR=3 THEN RY=RY+1 IF DIR=4 THEN RX=RX-1 CALL LOCATE(#1,(RY-1)*8+1,(RX-1)*8+1) CALL DELAY(2) IF HFLAG=1 THEN Home GOTO Explore // Go home routine Home: HFLAG=1 IF RX=HOMEX AND RY=HOMEY THEN DISPLAY AT(24,1)BEEP:"AT HOME!":: GOTO GetKey1 ELSE DISPLAY AT(24,1)BEEP:"GOING HOME..." Speak3: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:9 !Speak CALL DELAY(1) PRINT #1:3 !GOING HOME GOSUB BytePresent IF FLAG=0 THEN Speak3 StatusHome: ON ERROR StatusHome INPUT #1:ANS$ ON ERROR STOP IF VAL(ANS$)<>89 THEN Speak3 IF RY>HOMEY AND MAP(RY-1,RX)=0 THEN TDIR=1:: GOTO CheckFacing IF RY<HOMEY AND MAP(RY+1,RX)=0 THEN TDIR=3:: GOTO CheckFacing IF RX>HOMEX AND MAP(RY,RX-1)=0 THEN TDIR=4:: GOTO CheckFacing IF RX<HOMEX AND MAP(RY,RX+1)=0 THEN TDIR=2:: GOTO CheckFacing GOTO Explore CheckFacing: IF DIR<>TDIR THEN FacingTurn ForwardH: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:3 GOSUB BytePresent IF FLAG=0 THEN ForwardH StatusHF: ON ERROR StatusHF INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN ForwardH IF DIR=1 THEN RY=RY-1 IF DIR=2 THEN RX=RX+1 IF DIR=3 THEN RY=RY+1 IF DIR=4 THEN RX=RX-1 CALL LOCATE(#1,(RY-1)*8+1,(RX-1)*8+1) CALL DELAY(2) GOTO Home FacingTurn: IF ABS(TDIR-DIR)>2 AND TDIR<DIR THEN TurnRightH IF ABS(TDIR-DIR)>2 AND TDIR>DIR THEN TurnLeftH IF TDIR<DIR THEN TurnLeftH TurnRightH: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:4 GOSUB BytePresent IF FLAG=0 THEN TurnRightH StatusHR: ON ERROR StatusHR INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN TurnRightH DIR=DIR+1 DIRSPR=DIRSPR+1 IF DIR>4 THEN DIR=1::DIRSPR=106 CALL PATTERN(#1,DIRSPR) CALL DELAY(2) GOTO CheckFacing TurnLeftH: CALL IO(3,1,CRU+18,0) !CLEAR RECEIVE BUFFER PRINT #1:5 GOSUB BytePresent IF FLAG=0 THEN TurnLeftH StatusHL: ON ERROR StatusHL INPUT #1:ANS$ ON ERROR STOP IF ANS$<>"89" THEN TurnLeftH DIR=DIR-1 DIRSPR=DIRSPR-1 IF DIR<1 THEN DIR=4::DIRSPR=109 CALL PATTERN(#1,DIRSPR) CALL DELAY(2) GOTO CheckFacing // Resume exploration GetKey1: CALL KEY(0,K,S) IF S=0 THEN GetKey1 DISPLAY AT(24,1):" " HFLAG=0 GOTO Explore // Check for incoming byte over serial line BytePresent: COUNTER=0 CheckByte: CALL IO(2,1,CRU+21,BYTEIN) IF BYTEIN=0 THEN COUNTER=COUNTER+1 ELSE FLAG=1:: RETURN IF COUNTER>50 THEN FLAG=0:: DISPLAY AT(24,1)BEEP:"TIME OUT! RETRYING...":: CALL DELAY(1):: DISPLAY AT(24,1):" ":: RETURN ELSE GOTO CheckByte // Delay routine SUB DELAY(DUR) FOR I=1 TO DUR*100 NEXT I SUBEND
On the Hero Jr side, I ran a very simple Basic program which accepted coded commands mapped to specific robot functions and executed them, and also sent back sensor data and communication acknowledgments. All actual control and decision making was made by the TI.
1 REM HERO ROAM PROGRAM
10 INPUT C
20 IF C<>65 THEN GOTO 10
21 FOR I=1 TO 100:NEXT I
22 PRINT 1
30 INPUT C
35 IF C<1 THEN GOTO 30
36 IF C>9 THEN GOTO 30
40 ON C GOSUB 500,600,700,800,900,1000,1100,1200,1300
50 GOTO 30
500 REM FORWARD 5 UNITS
510 FWD 5
511 GOSUB 1510
515 PRINT 89
520 RETURN
600 REM BACKWARD 5 UNITS
610 BWD 5
611 GOSUB 1510
615 PRINT 89
620 RETURN
700 REM FORWARD 10 UNITS
710 FWD 10
711 GOSUB 1510
715 PRINT 89
720 RETURN
800 REM RIGHT ROTATION
810 RIGHT 90
811 GOSUB 1510
815 PRINT 89
820 RETURN
900 REM LEFT ROTATION
910 LEFT 90
911 GOSUB 1510
915 PRINT 89
920 RETURN
1000 REM LIGHT LEVEL DETECTION
1010 L=EYE
1011 GOSUB 1510
1015 PRINT L
1020 RETURN
1100 REM RANGE MEASUREMENT
1105 R=SONAR
1110 GOSUB 1510
1115 PRINT R
1120 RETURN
1200 REM INFRARED HEAT DETECTION
1210 I=MOTION
1211 GOSUB 1510
1215 PRINT I
1220 RETURN
1300 REM SPEAK FUNCTION
1305 INPUT C
1306 IF C<1 THEN GOTO 1305
1307 IF C>3 THEN GOTO 1305
1308 ON C GOTO 1310,1340,1370
1309 REM PLEASE MOVE CLEAR OF ME
1310 SPEAK "PLEZHPA1MOO1VPA1KLEERPA1OVPA1MEE"
1315 GOSUB 1510
1320 PRINT 89
1330 RETURN
1335 REM OBSTACLE DETECTED
1340 SPEAK "OBSTAEKLPA1DE1TEH3KTEHD"
1345 GOSUB 1510
1350 PRINT 89
1360 RETURN
1365 REM GOING HOME
1370 SPEAK "GOWINGPA1HO1O1MM"
1375 GOSUB 1510
1380 PRINT 89
1390 RETURN
1500 REM DELAY SUBROUTINE
1510 FOR T=1 TO 200:NEXT T
1520 RETURN
>
And here's the final result:
Another fun one ![]()
-
 3
3

0 Comments
Recommended Comments
There are no comments to display.